Обзор будет про программный продукт компании Vallen Systeme – VisualAE. Очень давно собирался его написать. Я считаю это ПО лучшим, на сегодняшний день, пакетом для акустико-эмиссионного контроля. Обзор основан на версии R2018.0726.
Конечно, все преимущества продукта раскрываются при регистрации данных, вместе с АЭ системами типа AMSY-6, однако, поскольку существуют конвертеры из форматов данных разного типа в формат Vallen, его можно использовать и при обработке данных, зарегистрированных АЭ системами других типов. ПО Vallen Systeme может быть приобретено отдельно и использоваться при оценке данных АЭК, зарегистрированных, например, системами PAC.
В настоящем обзоре пакет, в первую очередь, оценивается именно с этой позиции.
VisualAE является частью так называемого Vallen VisualCircle, который включает VisuaAE, VisualTR и VisualClass. VisualAE предоставляет интегральные возможности анализа АЭ данных, VisualTR – анализа данных формы волны АЭ сигналов, VisualClass – классификацию АЭ сигналов по форме волны. Компоненты связаны между собой и VisualAE, например, может получать информацию от VisualClass.
Кроме того, VisualAE – основная программа визуализации результатов регистрации данных АВЭ контроля в реальном времени. Дело в том, что, в отличие от большинства АЭ систем, в ПО Vallen Systeme программа регистрации данных (Vallen Acquisition32) отделена от программы их визуализации (VisualAE). При старте регистрации данных VisualAE «связывается» с Acquisition32 и результаты отображаются диаграммами и таблицами практически без задержек. При этом, если логика отображения результатов контроля должна быть изменена, это можно выполнить без прерывания регистрации.
Файл данных Vallen Acquisition32 представляет собой файл базы данных типа SQLight и, в принципе, может быть прочитан сторонним ПО. Этим подход Vallen Systeme радикально отличается от других производителей, которые, как правило, используют проприетарные форматы данных.
VisualAE – идеология, структура обработки данных
VisualAE представляет из себя модульную, настраиваемую среду анализа данных. Отличительные особенности VisualAE – наличие структуры обработки данных, наличие процессоров обработки и возможность формирования процессорами новых параметров АЭК, которые могут использоваться так же, как и уже существующие параметры.
Все, что касается анализа одного файла данных, собрано в «Проект обработки данных», частью которой является «Структура обработки данных» (рис. 1), включающая два раздела – «Структура данных» и «Структура листов».
«Структура данных» — древовидная форма, определяющая связи между исходными данными, процессорами (процессоры — элементы структуры, обрабатывающие данные) и визуальными элементами (процессорами отображения) — таблицами и диаграммами.
Каждый процессор получает исходные данные (или данные другого процессора), выполняет над ними определенные действия, и передает на выход как исходные данные, так и данные обработки. Процессор может быть подключен как к исходным данным испытания, так и к другому процессору, образуя таким образом «дерево» обработки данных.
Визуальные элементы являются конечными элементами этой структуры. Они могут отображать как исходные данные, так и параметры, получаемые в результате обработки данных процессорами. Изменение параметров какого-либо процессора (например, фильтрации) вызовет соответствующие изменения во всех нижерасположенных процессорах и визуальных элементах.
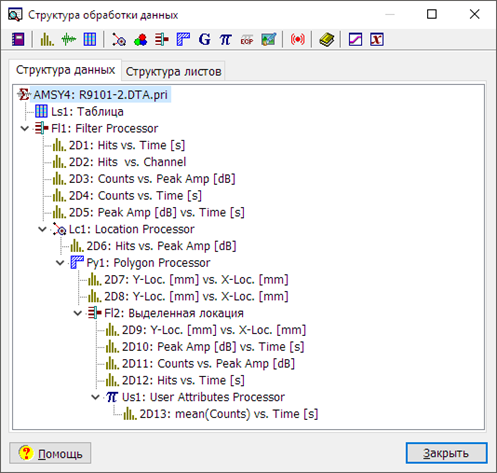
Рис. 1. Структура обработки данных
Визуальные элементы VisualAE (или процессоры отображения):
- диаграммы, представляющие АЭ-параметры или параметры, полученные при обработке данных процессорами – АЭ-диаграммы;
- диаграммы, представляющие форму сигнала – TR-диаграммы;
- данные в табличном виде – Таблицы;
- изображения.
Процессоры VisualAE:
- процессор фильтрации (ПФ);
- процессор локализации (ПЛ);
- процессор кластеризации (ПК);
- процессор полигонов (ПП);
- процессор пользователя или математический процессор (МП);
- процессор классификации (ПКЛ);
- процессор ECP – командный (программный) процессор (КП).
Для обмена процессорами между Проектами существует Библиотека процессоров.
Визуальное представление Проекта определяется «Структурой листов», включающая один и более листов, на которых размещаются визуальные элементы. Выбор листа возможен с помощью табулятора в нижней части окна. Макет каждого листа может быть легко изменен.
Визуальные элементы, имеющие источником один процессор и находящиеся на одном листе связаны между собой – выделение мышью точки на графике, строки в таблице вызывают переход или выделение соответствующего импульса на всех визуальных элементах страницы.
Итак, главное по идеологии:
- Структура обработки данных.
- Процессоры и визуальные элементы.
- Обработка результатов АЭК без физического удаления данных.
- Контролируемый оператором макет страницы, не зависящий от разрешения или пропорций монитора.
Визуальные элементы – АЭ-диаграммы, TR-диаграммы, таблицы
АЭ-диаграммы являются конечным и основным визуальным элементом VisualAE, инструментом отображения результатов обработки/анализа данных.
При добавлении в Структуру обработки данных новой диаграммы запускается «Мастер диаграмм». Оператор должен выбрать источник данных для диаграммы (исходные данные или какой-либо процессор), вид (двух- или трехмерная), атрибуты (отображаемые параметры) и тип диаграммы.
Двухмерные диаграммы
Возможности настройки двухмерных диаграмм предусматривают использование в качестве атрибутов осей любых параметров, которые могут быть предоставлены источником или источниками данных для диаграммы (в том числе, любых процессоров — локализации, кластеризации, математического процессора). Это дает, например, возможность легкого построения диаграммы, иллюстрирующую выполнение эффекта Кайзера (см. ниже), построение которой в других системах или невозможно, или крайне затруднительно. Каждая диаграмма может включать вторую вертикальную (правую) ось (см. рис. 2).
Диаграммы, расположенные за процессором локализации, могут отображать данные либо от всех импульсов, либо только от первых импульсов событий.
За отображение информации отвечают серии данных, задаваемые на закладках Корреляции или Распределения. Как Корреляции, так и Распределения могут включать несколько одновременно отображаемых серий, при этом на диаграмме могут быть одновременно представлены как серии типа Корреляции, так и серии типа Распределения. Каждая серия отображает собственный набор данных, определяемый фильтром серии (имеющим возможности, аналогичные процессору фильтрации – фактически — графическая фильтрация), и предусматривает индивидуально настраиваемые цвет, стиль, легенду для отображаемых данных (рис. 4).
Основное назначение серий закладки Корреляции (см. рис. 2) и соответствующего им корреляционного типа отображения – отображение данных в виде точек. Корреляционные данные диаграмм, имеющих один источник данных, связаны между собой, а также с другими визуальными элементами – данными в табличной форме и TR-диаграммами. Выделение при помощи мыши точки на одной диаграмме (в т.ч. локационной) вызовет выделение ее на других диаграммах, а также переход к соответствующей строке таблицы и форме сигнала на TR-диаграмме.
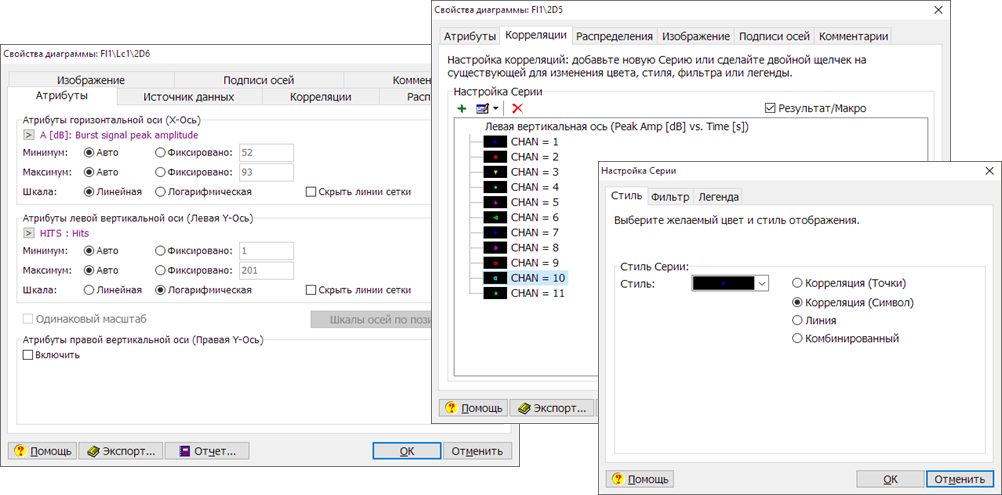
Рис. 2. Настройка атрибутов диаграммы, закладки «Корреляции» и настройка серии
Примеры диаграмм, использующих серии типа Корреляция: диаграммы Амплитуда – Время или Количество выбросов – Амплитуда, локационные диаграммы.
Серии, назначаемые на закладке «Распределения» (см. рис. 3), используются для представления данных АЭК в виде гистограмм и линейных графиков. При этом горизонтальная ось диаграммы, ось Х, делится на интервалы. Тип обработки данных в интервале одинаковый для всех серий – данные могут суммироваться, может быть выбрано среднее или максимальное значение в интервале. Тип обработки интервалов в пределах оси может быть выбран для каждой серии индивидуально и задается стилем серии. Предусмотрены следующие стили: гистограмма, линейный и ступенчатый независимый графики, ступенчатые с накоплением от минимума к максимуму и от максимума к минимуму.
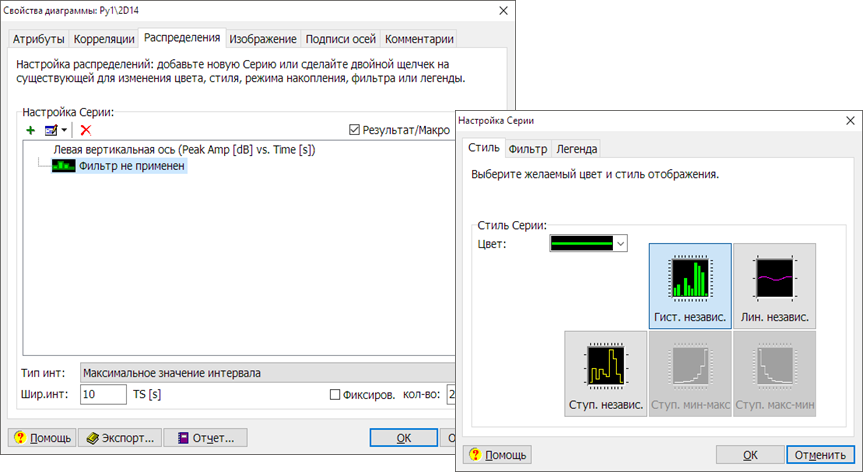
Рис. 3. Закладка «Распределения» и настройка серии для закладки «Распределения»
Примеры диаграмм, использующих Распределения: диаграмма Количество импульсов (количество выбросов, длительность, энергия) – Время, Количество импульсов – Каналы, диаграмма локации, использующей линейный алгоритм.
Для удобства представления информации для двухмерных диаграмм предусмотрена возможность использования «подложки» в виде JPG файла или динамическое формирование цвета фона диаграммы в зависимости от значений вертикальной оси.
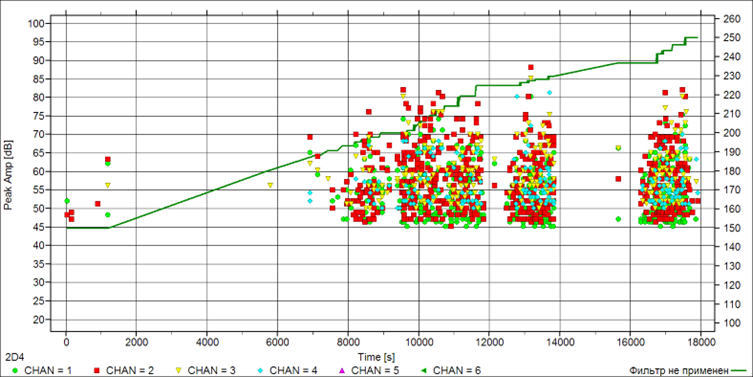
Рис. 4. Диаграмма с серией типа Корреляция и правой осью с серией типа Распределение
Трехмерные диаграммы
Трехмерные диаграммы могут быть использованы для расширенного представления данных, при одновременном отображении трех параметров, регистрируемых в течение АЭК (рис. 5). При трехмерном отображении данных используются, разные виды Распределений. Настройка параметров вкладки «Распределения» по осям Х и Z аналогична их настройке для двухмерных диаграмм. Для оси Y могут быть определены пороговые величины и цвет отображаемых данных в зависимости от их значения.
Примеры трехмерных диаграмм: диаграммы сферической и планарной локации, трехмерное представление диаграммы Количество выбросов/Амплитуда/Импульсы, когда значение по оси Импульсы отражает количество зарегистрированных импульсов с определенной амплитудой и количеством выбросов («плотности» импульсов).
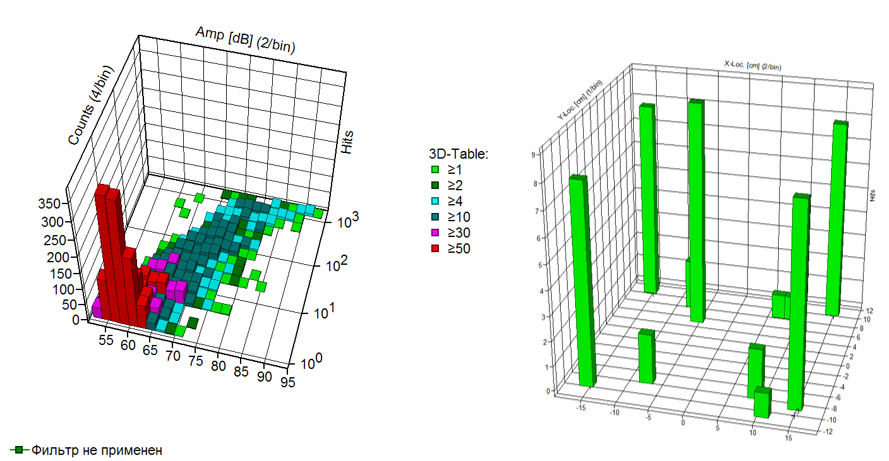
Рис. 5. Трехмерные диаграммы: количество выбросов/амплитуда, планарная локация
Таблицы
Таблицы в VisualAE настраиваемые, имеется возможность вывести как все параметры записи АЭ импульса, так и результаты вычислений любых процессоров. При выборе (мышью) записи в таблице, соответствующие TR-диаграммы и точки на корреляционных графиках также будут отмечены (и наоборот).
Таблицы являются незаменимым средством просмотра данных, проверки результатов работы процессоров.
Главное по диаграммам и таблицам:
- Отображение любых параметров данных или процессоров
- Гибкое отображение данных, дополнительная ось, серии, фильтры серий, одновременное отображение разных серий.
- Связь между таблицами, АЭ-диаграммами, TR-диаграммами
- Увеличение и панорамирование
- Практические примеры использования диаграмм приведены в разделах 9 и 10 «AMSY-6. Operation manual».
TR-диаграммы
Форма волны импульсов (если таковая зарегистрирована) может быть отображена на TR-диаграммах. TR-диаграмм0ы VisualAE имеют базовый набор функций по визуализации импульсов – сигнал, линейный и логарифмический спектры. Этих функций достаточно для предварительного анализа формы волны импульсов (программа VisualTR предоставляет большие возможности по анализу формы). Обзор возможностей VisualAE при работе с формой волны запланирован в следующей части.
Локализация АЭ источников в пакете VisualAE, процессор локализации
Локализация источников АЭ в VisualAE осуществляется процессором локализации (ПЛ). Задачей ПЛ является разделение потока АЭ данных на события, осуществляемое конструктором событий, с последующим определением координат источников АЭ. Процессоры, расположенные за ПЛ получают доступ к событиям АЭ, их характеристикам, координатам источников, точности их определения и некоторым другим параметрам.
При настройке процессора локализации прежде всего необходимо назначить используемые в данном процессоре ПАЭ. Каждому ПАЭ присваивается один из четырех типов:
- обычный (N) – ПАЭ используется при локализации источников АЭ в случае, если ПАЭ
- является первым или последующим импульсом в АЭ событии.
- блокирующий (G) – если ПАЭ является первым в событии, то это событие не
- рассматривается при локализации; если одним из последующих – информация с этого ПАЭ не используется при вычислении местоположения источника АЭ.
- совмещенный (C) – если ПАЭ является первым в событии, то событие не
- рассматривается при локализации; если одним из последующих – то информация этого ПАЭ используется при вычислении местоположения источника АЭ.
- неиспользуемый (U) – ПАЭ не используется при локализации источников АЭ и удаляется из списка ПАЭ.
Первым этапом локализации источников является группировка сигналов по событиям, принадлежащим одному источнику. Этот процесс управляется специальными временными параметрами, задаваемыми оператором:
FHCDT (Время выделения 1-го импульса) – используется для разделения событий и выделения первых импульсов событий.
DT1X-Max (Макс. dT от 1-го импульса) – определяет максимальную разницу времени между временами регистрации первого и последнего импульса события.
DTNX-Max (Макс. dT от предыд. импульса) – определяет максимальную разницу времени между временами регистрации импульсов в событии.
Далее определяется принадлежность события к заданным при настройке ПЛ антеннам. Антенной называется совокупность каналов, логически объединенных с целью определения местоположения АЭ источника. ПЛ включает, как правило, одну и более антенн. Каждая антенна имеет определенный тип локации.
Конструктор событий
Для выполнения зонного типа локации достаточно заполнить вкладку «Конструктор событий» (рис. 6). При этом процессоры, расположенные за ПЛ, получают доступ к результатам выделения событий – первому и последующим импульсам события, РВП, количеству импульсов в событии и т.п.
На вкладке «Конструктор событий» задаются номера используемых преобразователей (ПАЭ), их тип, критерии выделения событий из потока данных, скорость звука в объекте и максимальный диаметр окрестности ПАЭ.
Преобразователь может иметь следующий тип:
— обычный (N) – ПАЭ используется при локализации источников АЭ в случае, если ПАЭ является первым или последующим импульсом в АЭ событии.
— блокирующий (G) – если ПАЭ является первым в событии, то это событие не рассматривается при локализации; если одним из последующих – информация с этого ПАЭ не используется при вычислении местоположения источника АЭ.
— совмещенный (C) – если ПАЭ является первым в событии, то событие не рассматривается при локализации; если одним из последующих – то информация этого ПАЭ используется при вычислении местоположения источника АЭ.
— неиспользуемый (U) – ПАЭ не используется при локализации источников АЭ и удаляется из списка ПАЭ.
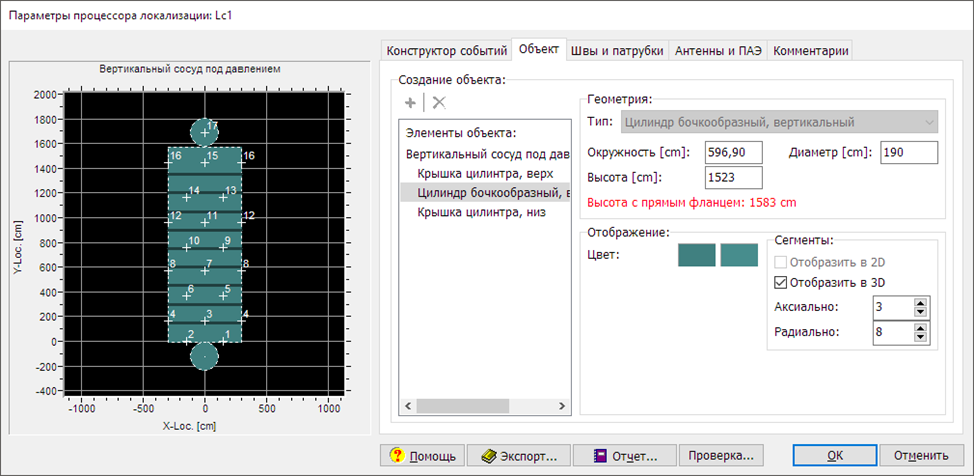
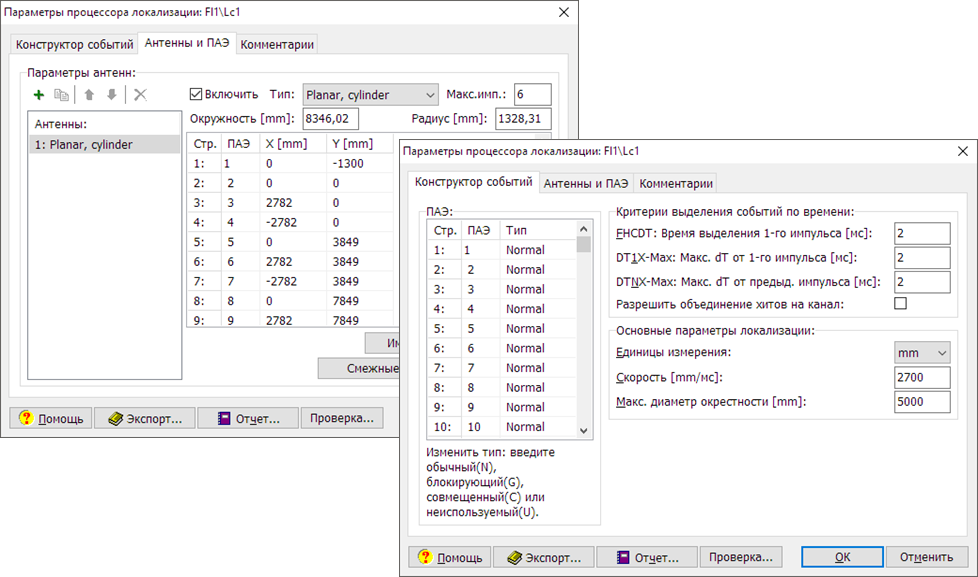
Рис. 6. Процессор локализации – Объект, Конструктор событий, Антенны и ПАЭ
Результаты конструктора событий ПЛ:
EV АЭ событие, может состоять из одного и более импульсов;
SIGS количество импульсов в событии;
1.CH..7.CH номер ПАЭ первого..седьмого импульса в событии;
DT1X РВП между текущим и первым импульсами события (только для таблиц);
DT1L РВП между первым и последним импульсами события (только для таблиц);
DT12..DT17 РВП между первым и вторым..седьмым импульсами события.
Все процессоры, расположенные за ПЛ, в котором заданы параметры на вкладке «Конструктор событий» получают доступ к вышеуказанным результатам работы процессора.
Антенны и ПАЭ
На вкладках «Объект» и «Антенны и ПАЭ» диалога «Параметры процессора локализации» (рис. 6) задаются тип и размеры объекта локации, антенны, тип локации антенн, номера и координаты ПАЭ.
Для определения параметров локализации источников АЭ необходимо:
- задать объект, тип корпуса, днищ (для сосуда или сферы), его размеры
- назначить антенну(ы),
- назначить тип и вид локации,
- задать максимальное количество обрабатываемых в событии импульсов,
- задать ПАЭ и их координаты с учетом параметров объекта, типа и вида локации.
Помимо зональной, VisualAE поддерживает следующие типы локации:
- Линейную (стержень или кольцо);
- Планарную (в т.ч. цилиндрическую);
- Локацию днища резервуара;
- Трехмерную (пошаговая, градиентная, типа кубоид);
- Сферическую.
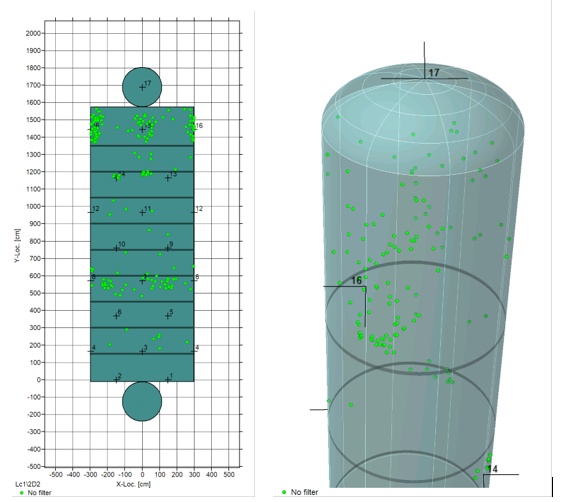
Рис. 7. Процессор локализации – Результаты локации
Результаты вычисления местоположения источников АЭ:
CGRP номер локационной антенны;
LUCY показатель точности локации Location UnCertaintY, рассчитывается при определении координат источника;
RANK ранг события – актуален, если событие регистрируется несколькими антеннами;
Loop количество шагов итерации в итерационных алгоритмах;
X X-координата;
Y Y-координата;
Z Z-координата;
LONG долгота в градусах (сферическая локация);
LATI широта в градусах (сферическая локация), экватор соответствует 0°;
SEQU код последовательности ПАЭ в событии;
Dst1..Dst7 расстояние от вычисленного положения источника до ПАЭ, первым..седьмым зарегистрировавшим событие.
Результаты выделения событий из потока данных и определения координат источников АЭ могут быть отображены в таблицах и на диаграммах, использованы в других процессорах для фильтрации, анализа и вычислений.
Погрешность определения местоположения источника АЭ (LUCY)
Точность определения координат источника АЭ (или погрешность локализации, с другой стороны) характеризуется параметром LUCY (Location UnCertaintY). Параметр LUCY может быть определен, если событие зарегистрировано по крайней мере одним дополнительным ПАЭ, т.е. для линейных типов локации LUCY может быть определен, если количество составляющих событие импульсов 3 и более, для планарной – 4 и более.
Отображение на диаграммах
Результаты работы ПЛ могут быть отображены на размещенных за ним диаграммах (рис. 7). Местоположение источников АЭ отображаются на локационных диаграммах в системе координат, предусмотренной соответствующим типом локации. Для линейной локации применяются, как правило, гистограммы типа Параметр события/Х-координата, для планарной локации и локации днищ резервуаров – корреляционные диаграммы типа Х-координата/Y-координата или 3-х мерные – координаты/количество событий, для сферической локации, локации типа сосуд и трехмерной локации – трехмерные корреляционные диаграммы типа Х-координата/Y-координата/Z-координата.
При этом, если локация включает несколько антенн (сосуд, например), для получения однозначного результата целесообразно использовать фильтр по параметру RANK.
Для выделения событий с наименьшей ошибкой определения координат рекомендуется использовать фильтрацию по значению LUCY.
Диаграммы, находящиеся за ПЛ, получают возможность работы с первыми импульсами событий или со всеми импульсами события (устанавливается на вкладке «Источник данных» диаграммы).
Проверка точности локации
Следует учитывать, что при распространении сигнала от источника до ПАЭ неизбежно возникают ошибки разницы времени прихода (РВП) и, соответственно, ошибки определения координат источников АЭ. Причины ошибок – несоответствие математической локационной модели объекта его реальной структуре, ошибки округления в алгоритмах, расчетах, сложные пути распространения сигналов по корпусу объекта, различные моды волн регистрируемых сигналов, неодинаковая скорость звука в продольном и поперечном направлении проката металла обечаек корпуса объекта, наличие сварных соединений, штуцеров и других элементов объекта на путях распространения сигналов и т.п.
Если акт АЭ зарегистрирован большим количеством ПАЭ, чем требуется для данного типа локации, то, с учетом этой избыточной информации, положение источника может быть уточнено и/или определена ошибка расчета его местоположения (фильтрация результатов по значению LUCY).
При определении типа и вида локации, определении количества и назначении позиций ПАЭ необходимо учитывать, что в общем случае (если условиями АЭК не подразумевается иное) путь сигнала от источника АЭ до ближайших ПАЭ (т.е. тех ПАЭ, по информации от которых происходит вычисление координат источника) должен проходить по корпусу объекта, а не через испытательную среду. В противном случае неизбежны ошибки в определении положения источника АЭ.
Любой алгоритм локализации должен удовлетворять следующим требованиям:
- Событие, которое может быть лоцировано, должно быть лоцировано;
- Одно событие должно лоцироваться один раз;
- Точность локации должна быть не менее +/-5% от расстояния между ПАЭ.
В любом случае, нужно иметь в виду, что локация и локационные алгоритмы – это чисто программные конструкции и они могут быть добавлены, удалены, уточнены, изменены, полностью переработаны в процессе анализа данных.
Определение и сравнение точности локации различных акустико-эмиссионных систем имеет смысл проводить в три этапа:
- Определение точности локации для искусственных файлов – т.е. файлов, содержащих данные, сформированные искусственно, в которых разница времени регистрации (РВП) определена математическими алгоритмами.
- Определение точности локации на реальном объекте, с реальными средами, при генерировании сигналов в определенных местах объекта стандартным источником АЭ – Су-Нильсена или электронным калибратором.
- Определение точности локации в практических испытаниях.
Автором разработана программа генерации искусственных файлов данных для следующих типов объектов – стержень, лист, сфера (AE Datafile Generator, см. рис. 8).
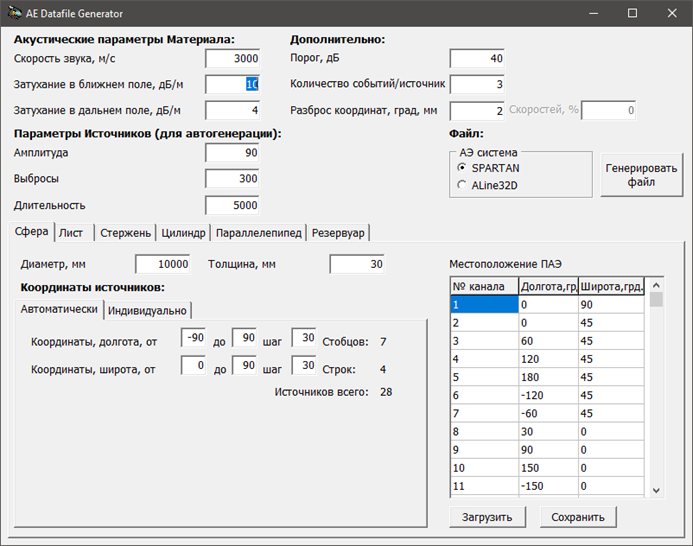
Рис. 8. Программа подготовки искусственных файлов данных
На рис. 9 представлена работа алгоритма плоскостной локации VisualAE с таким файлом для листа. Результаты локализации практически идеальны.
На рис. 10 представлен результаты локализации по алгоритму сферической локации. Результаты локализации также соответствуют заданным источникам.
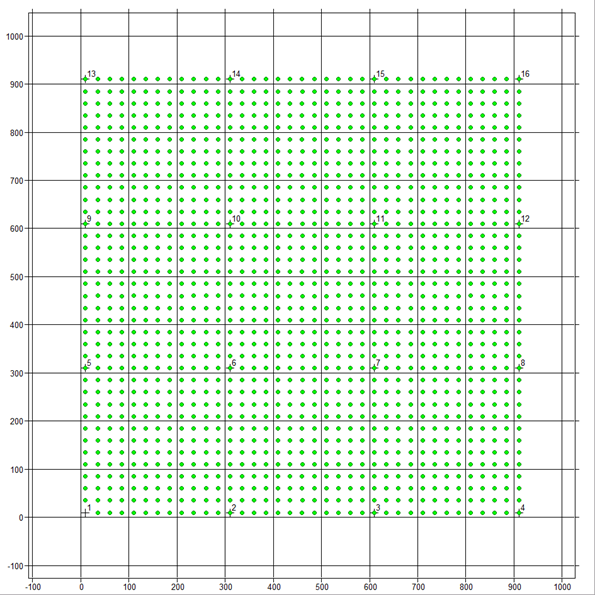
Рис. 9. Процессор локализации – искусственный файл — лист

Рис. 10. Процессор локализации – искусственный файл — сфера
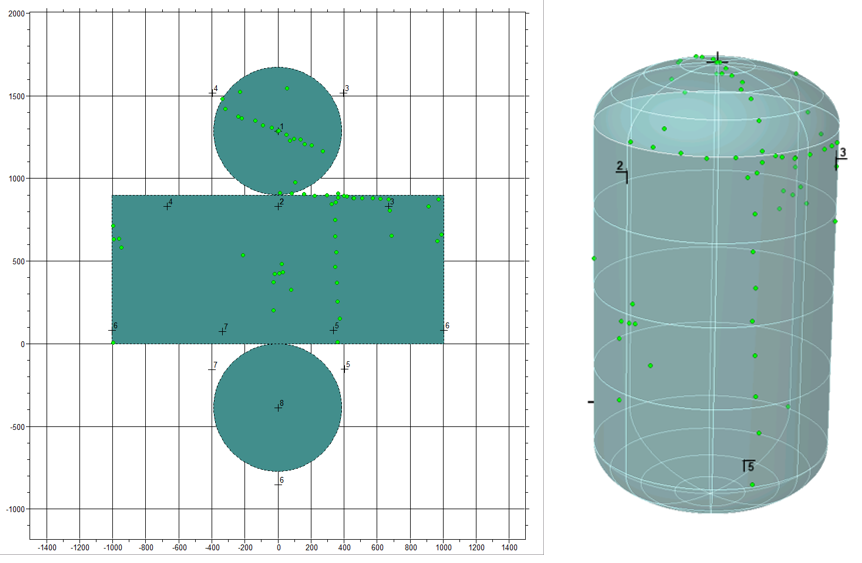
Рис. 11. Процессор локализации – сосуд, источник Су-Нильсена
Результаты локализации от стандартного источника АЭ (Су-Нильсена) приведены на рис. 11. В последних версиях VisualAE реализована комплексная локация горизонтальных, вертикальных сосудов с днищами разного типа (полусферическими, эллиптическими и т.п.). Реализована возможность нанесения на обечайку сварных швов и штуцеров. Днища и обечайка являются отдельными антеннами в одном общем локационном процессоре.
ВАЖНО!!! Поскольку одно событие (излом сердечника карандаша) может фиксироваться и отображаться более чем одной антенной (например, антенной днища и обечайки), необходимо оценивать результаты локации по значению RANK, которое имеет значение 1 для антенны, первой зарегистрировавшей событие, 2 – для второй антенны и т.д.
Для правильного представления результатов локации необходимо применить фильтрацию по значению RANK.
Результаты практической локации и сравнение различных алгоритмов локализации приведены в разделе 12 «AMSY-6. Operation manual».
Резюме по локации: VisualAE имеет развитые и контролируемые возможности по локализации источников АЭ, и отвечает требованиям к локации. Возможности VisualAE по отображению и связи данных таблиц, диаграмм позволяют понять особенности локационных алгоритмов и, при необходимости, внести корректировки в настройки локационных процессоров.
Процессор фильтрации
ПФ предназначен для выделения или исключения АЭ данных для/из дальнейшей обработки. Может обрабатывать как все импульсы, так и первые импульсы событий (если ПФ располагается за процессором локализации) – тогда решение о принятии/исключении относится ко всем импульсам события. Параметрами ПФ могут быть как первичные параметры АЭ записи, так и любые параметры, являющиеся результатами вычислений/работы процессоров.
Процессор фильтрации позволяет выделить для последующего анализа данные от событий по их координатам или номеру ПАЭ, а также осуществлять фильтрацию данных по остальным параметрам событий, формируемым ПЛ.
Пример: для выборки событий, в которых первыми были ПАЭ 2 и 4 необходимо использовать фильтр (и разместить его за соответствующим ПЛ):
АЭ запись проходит фильтр…
если это условие верно:
1.CH = 2
или это условие верно:
1.CH = 4
В этом случае будут выбраны все импульсы событий, которые начинались с ПАЭ 2 или 4.
Ниже (рис. 12) приведен ПФ, выделяющий импульсы с амплитудой выше 50 дБ, зарегистрированные с 100 по 5000 секунды испытания.
О процессоре фильтрации: необходимый и востребованный процессор, мощный, наглядный, работает с любыми параметрами, первыми импульсами событий. Необходимо отметить, что процессор фильтрации VisualAE направлен, в первую очередь на выделение и последующий анализ интересующих данных, а не на исключение, например, записей помех и шумов, хотя это и возможно.
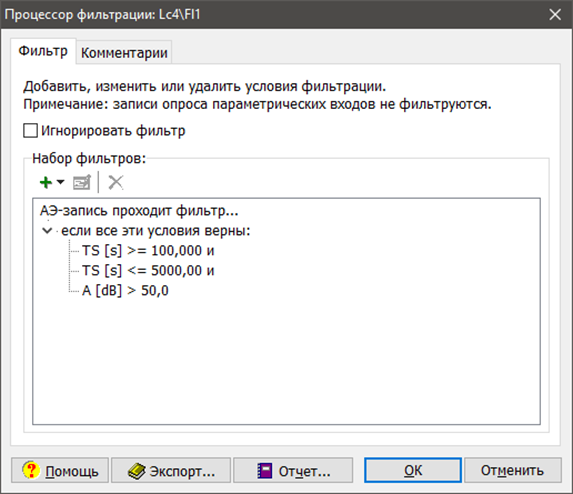
Рис. 12. Процессор фильтрации
Процессор кластеризации
ПК предназначен для объединения данных по признакам сходства параметров. Наиболее частое применение – кластеризация лоцированных событий по координатам – в этом случае ПК ставится после ПЛ и для выполнения кластеризации должны быть определены форма, атрибуты (параметры) и размеры кластеров. Однако, в общем случае, кластеризация может быть применена для любых точечных диаграмм.
Как правило, также необходимо определить пороговые значения для накопленных кластером данных и соответствующие им цвета кластера. На локационных диаграммах, расположенных после ПК, кластеры представляются при этом в виде фигур соответствующей формы и цвета (рис. 13).
Философия работы процессора кластеризации, в частности, при кластеризации локационной диаграммы следующая: первое событие, которое может быть лоцировано, получает идентификатор кластера – 1. Следующее лоцируемое событие получает тот же идентификатор, и считается принадлежащим тому же кластеру, что и первое, если его координаты отличаются от координат первого не более, чем на размер кластера, или, в противном случае, получает новый идентификатор кластера. Таким образом, любое лоцированное событие входит в какой-либо кластер и имеет соответствующий идентификатор. Кластеры, которые имеют количество элементов равное или более соответствующего предела, выделяются фигурой соответствующей формы и цвета. Можно сформировать список параметров, формирующихся для каждого кластера, например суммарная, средняя или максимальная амплитуда, суммарная энергия и т.п.
Результаты: каждый кластер имеет уникальный числовой идентификатор (Cluster ID), который имеет постоянное значение в данной ветке структуры обработки данных и показатель количества зарегистрированных кластером элементов (Cluster Members). Эти параметры могут использоваться при дальнейшей обработке данных (фильтрации и т.п.). Однако, фильтр, выделяющий кластеры с количеством элементов более 10, например, даст несколько неожиданный результат – кластер 40, накопивший в результате, скажем 56 элементов, будет показан начиная с 11-ого события, поскольку Cluster Members – это свойство конкретного импульса и, пока это значение не станет больше 10, элементы не будут учитываться.
В свойствах ПК доступна таблица всех кластеров, представляющая настраиваемую информацию о статистике данных, зарегистрированных в соответствующем кластере (см. рис 13).
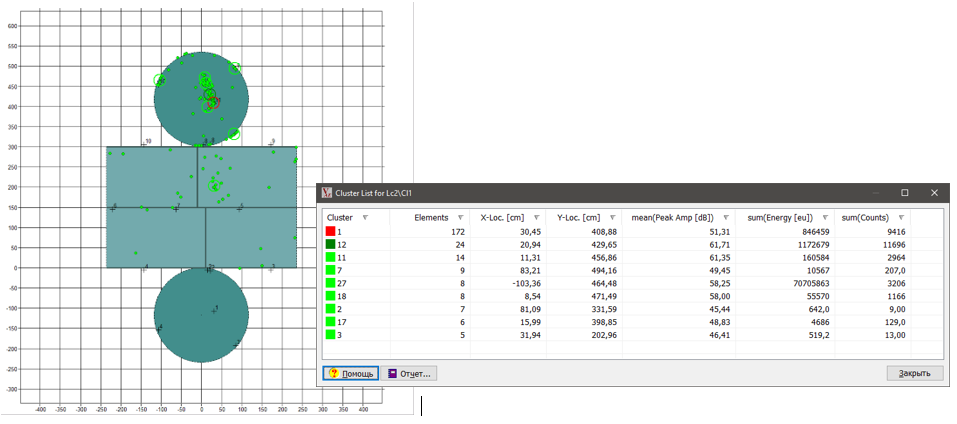
Рис. 13. Кластеризация и таблица кластеров
На рисунке 14 представлены:
- результаты кластеризации на локационной диаграмме;
- распределение количества элементов кластера по их идентификаторам;
- результаты фильтрации по идентификатору кластера на локационной диаграмме и диаграмме Амплитуда-Время.

Рис. 14. Кластеризация и ее результаты
Резюме по процессору кластеризации: ПК незаменим для группировки данных по каким-либо признакам, первое, что приходит в голову – по локационным координатам. Позволяет исследовать кластеризованные данные выборочно, фильтруя, например, по идентификатору кластера.
В принципе, кластеризовать можно любые данные и отобразить результат на соответствующей диаграмме. На рисунке ниже представлен процессор кластеризации и соответствующая диаграмма выделения периодов испытания, для которых в течение 10 сек фиксировалось не менее 50 импульсов с амплитудой, отличающейся не более чем на 5 дБ.
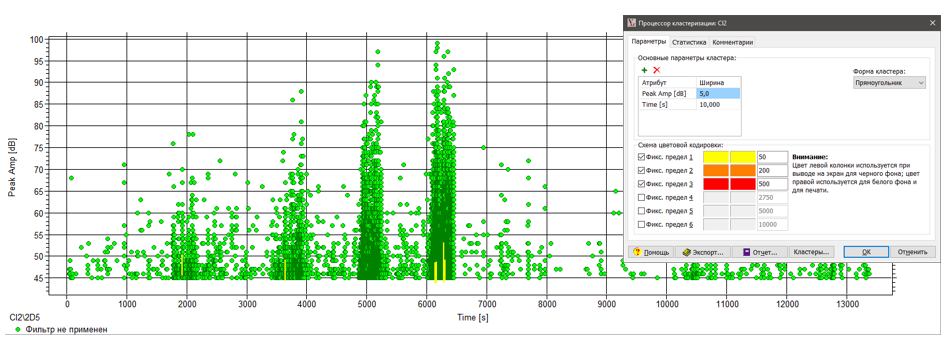
Рис. 15. Кластеризация по полям время и амплитуда
Процессор полигонов
Процессор полигонов (рис. 16) позволяет вручную выделить на точечных диаграммах (в т.ч. локационных), назначаемых при формировании процессора, области (полигоны) произвольной формы. Каждый полигон при этом имеет уникальный числовой идентификатор. Доступно до 4-х групп полигонов (A, B, C, D)
Результаты: в результате работы ПП появляется возможность работать с идентификаторами полигонов. Эти данные могут использоваться в процессорах фильтрации, диаграммах, таблицах, математических процессорах.
Назначение: выделение или исключение интересующих пользователя данных, в т.ч. локационных. Полуавтоматическое выделение данных, например, данных по выдержкам.
Особенности: если полигон назначен на графике, представляющем первые импульсы событий (локационные или корреляционные), то фильтрация по полигону обеспечивает доступ (или исключает) как к первым, так и ко всем последующим импульсам событий. Если полигон назначен на диаграмме, на которой данные ВИЗУАЛЬНО ограничены (например, представлен только один канал), то после фильтрации по номеру полигона останутся (или будут исключены) ВСЕ данные (по всем каналам), попадающие в область полигона.

Рис. 16. Использование процессора полигонов
Резюме по процессору полигонов: удобный инструмент, в концепции VisualAE – можно быстро удалить, например, участки помех, выделяя их на нужных диаграммах (см. рис. 17). Другой вариант – выделение на локационной диаграмме зоны, для которой производится дополнительный анализ данных.
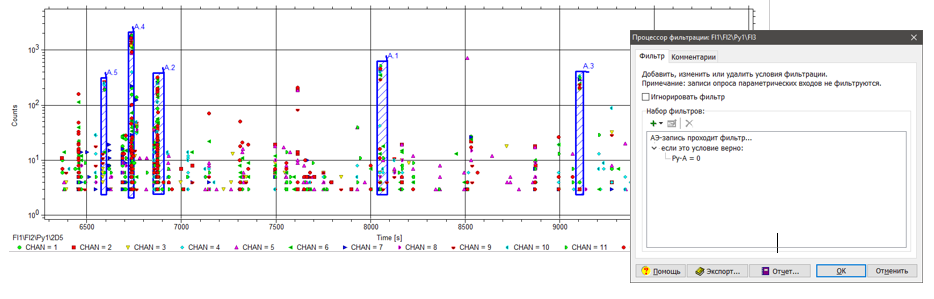
Рис. 17. Исключение помех с использованием процессора полигонов
Математический (или пользовательский) процессор
Использование МП дает возможность, выполняя заданные математические действия над существующими данными, определять новые параметры, по которым можно осуществлять фильтрацию, которые можно использовать на диаграммах, помещенных после МП, и над которыми также можно выполнять операции. Так, например, с помощью математического процессора может быть оценено выполнение эффекта Кайзера, оценка энергетической интенсивности источников АЭ. Результаты МП могут группироваться по каналам. Размещенный после процессора локации МП работает с первыми импульсами событий.
Доступные функции:
Статистические: Минимальное, максимальное, суммарное, среднее значение, дисперсия, стандартное отклонение, изменение среднего значения параметра.
Выражения: Отношение, произведение, сумма, степень, логарифм, линейные функции, касающиеся двух параметров.
Функция коррекции амплитуды Amp.-Corr.: коррекция амплитуды (определение первичной амплитуды сигнала АЭ по данным затухания). При этом коррекция амплитуды выполняется по разным алгоритмам для ближнего (до 20 толщин стенки) и для дальнего поля (рис. 18):
if DST1 < D20 then
Ac = A + DST1 * (At20/D20) для ближнего поля
else Ac = A + At20 + (DST1-D20) *(Atmax — At20) / (Dmax — D20) для дальнего поля
здесь:
Ac корректированная (первичная) амплитуда первого импульса события, дБ;
A измеренная амплитуда первого импульса события, дБ;
DST1 вычисленное расстояние от источника до ПАЭ, принявшего 1-ый импульс, единицы локации;
At20 ослабление амплитуды АЭ сигнала на расстоянии «20 толщин стенки» от источника или амплитуда источника минус амплитуда, измеренная на расстоянии «20 толщин стенки», дБ;
D20 расстояние в 20 толщин стенки, единицы локации;
Dmax максимальное расстояние регистрации при контрольном пороге, единицы локации;
Atmax ослабление амплитуды АЭ сигнала на максимальном расстоянии или максимальная амплитуда минус порог, дБ.
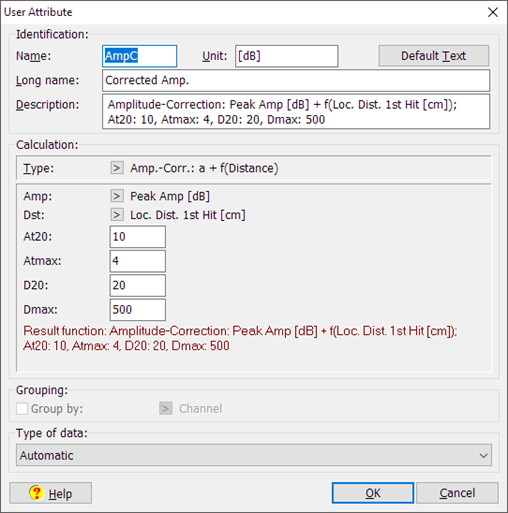
Рис. 18. Пример Математического Процессора
Дополнительные статистические функции: служат для определения скорости изменения параметров АЭ импульсов:
если дана переменная (b — обычно значение параметра или время) и интервал ее изменения (ΔB), а также суммарное значение другой переменной (x — обычно энергия, импульсы, длительность…) в этом интервале ΔB, то:
Sum1 = Σx вычисленная в текущем интервале (b-ΔB..b),
Sum2 = Σx вычисленная в предыдущем интервале (b-2ΔB..b-ΔB).
С помощью Sum1 и Sum2 определяются следующие функции скорости:
Rate1: Sum1 / ΔB, или полное выражение Σ(x[b-ΔB]..x[b]) / ΔB;
Rate1 – это отношение суммарного параметра АЭ (выбросы, энергия..) на интервале к изменению параметра нагружения (давление или время), т.е., фактически, скорость накопления АЭ параметра. При определении функции задаются параметры АЭ и нагружения, а также величина интервала.
Таким образом, Rate1 – это скорость накопления АЭ параметра на единицу изменения параметра нагружения, размерность соответствующая – единицы АЭ параметра/единицы параметра нагружения. Оценка скорости накопления АЭ параметров включена в многие системы критериев: ASTM E569, MONPAC.
Rate2: Sum1 / Sum2, или полное выражение Σ(x[b-ΔB]..x[b]) / Σ(x[b-2ΔB]..x[b-ΔB]);
Rate2 – это отношение суммарного параметра АЭ (выбросы, энергия..) на текущем интервале к суммарному параметру АЭ на предыдущем интервале. При определении функции задаются параметр АЭ, параметр нагружения, величина интервала его изменения, а также минимальное значение параметра АЭ, принимаемое к расчету.
Rate2 – это безразмерная величина, характеризующая приращение АЭ параметра на текущем интервале по отношению к предыдущему. Максимальное значение не ограничено, минимальное – стремится к нулю.
Может быть применен для оценки выполнения критерия накопления энергии стандарта EN 14584: в течение двух последовательных интервалов пятипроцентного изменения нагрузки суммарная зарегистрированная энергия по одному или более каналов удваивается. Т.е., если значение соотношения Sum1/Sum2 по любому каналу становится более 2, то критерий нарушен, при условии, что ΔB соответствует 5% изменению нагрузки.
Rate3: Sum1 / (Sum1 + Sum2), или полное выражение Σ(x[b-ΔB]..x[b]) / Σ(x[b-2ΔB]..x[b]).
Rate3 – это отношение суммарного параметра АЭ (выбросы, энергия..) на текущем интервале к суммарному параметру АЭ на предыдущем и текущем интервалах. При определении функции задаются параметры АЭ и величина интервала.
Rate3 – также как и Rate2 безразмерная величина, максимальное значение – стремится к единице (энергия нарастает), минимальное – стремится к нулю (суммарная энергия не нарастает). Физический смысл – аналогичен Rate2.
Практическое применение математического процессора
МП может быть использован для получения значения локационной амплитуды лоцированных событий, причем вычисление этой амплитуды производится согласно положениям стандарта EN 14584, «прозрачно» и контролируемо, с учетом затухания в ближней и дальней зонах.
Диаграмма, представляющая выполнение эффекта Кайзера (см. рис. 19) с помощью МП может быть легко построена для любого АЭ параметра и параметра нагружения (от датчика давления или искусственно введенного).
Реализация производных параметров, которые могут использоваться в любых процессорах VisualAE так же, как и обычные параметры АЭ, использоваться как критериальные (максимальные, суммарные значения, скорости накопления параметров), использоваться как дополнительные параметры АЭ импульсов – такие, как, например, соотношения Времени Нарастания и Длительности, Количества Выбросов и Длительности для оценки и фильтрации.
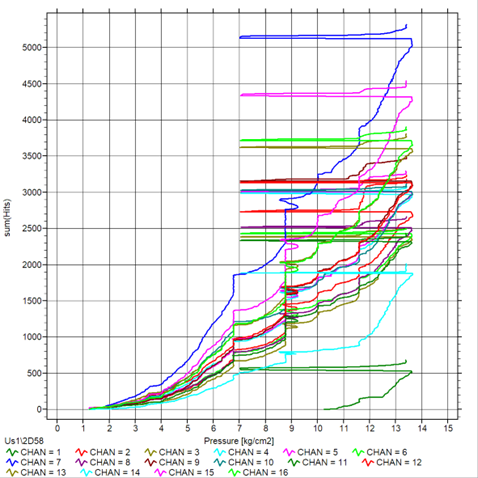
Рис. 19. Иллюстрация выполнения эффекта Кайзера
Процессор классификации
ПКЛ основан на параметрах Severity и Historic Index, предложенных в статье Тимоти Дж. Фоулера в «Журнале Акустической Эмиссии» за 1989 г. и используемых в технологии АЭ контроля MONPAC. Severity зависит от особенностей обсчета энергии конкретной АЭ системой, Historic Index – безразмерный параметр.
Результаты: Historic Index – текущее значение параметра
Max Historic Index – максимальное значение параметра
Severity – текущее (и максимальное) значение параметра
Использование: прямое применение процессора классификации проблематично, поскольку энергетический параметр АЭ систем Vallen Systeme не вполне соответствует по значениям энергетическому параметру систем PAC (Physical Acoustic Corporation, разработчик MONPAC). При необходимости
Процессор ECP (Embedded Code Processor)
Командный процессор представляет собой расширение Математического Процессора и включает встроенный язык программирования, позволяющий выполнять над АЭ записями любые операции. Так, например, с помощью математического процессора может быть произведена оценка результатов АЭК по локально-динамическому критерию.
Встроенный язык программирования ECP основан на языке программирования Lua, с некоторыми ограничениями, из-за специфики ПО VisualAE. Описание Lua приведено в документе «ECP: LUA Scripting Language. Reference Manual». Практическое применение ECP и Lua приведено в документе «Embedded Code Processor. User Manual».
С помощью языка программирования ECP есть возможность доступа как ко всем параметрам АЭ записей, так и к параметрам испытания, язык включает массивы, списки, очереди, операции ввода/вывода в файл.
Для использования КП необходимо задать набор входных (любые параметры АЭ записи или других процессоров) и выходных параметров. Входные параметры – это параметры, которыми оперирует программный код КП. Выходные параметры – это параметры, которые формируются КП. Во вкладке «Инструкции» формируется код процессора (см. рис. 20).
Секция кода между тегами <ECP_ExecuteOnReset> и </ECP_ExecuteOnReset> выполняется при запуске процессора, т.е. один раз.
Секция кода между тегами <ECP_ExecuteOnDataSet> и </ECP_ExecuteOnDataSet> выполняется для каждой записи, обрабатываемой процессором.
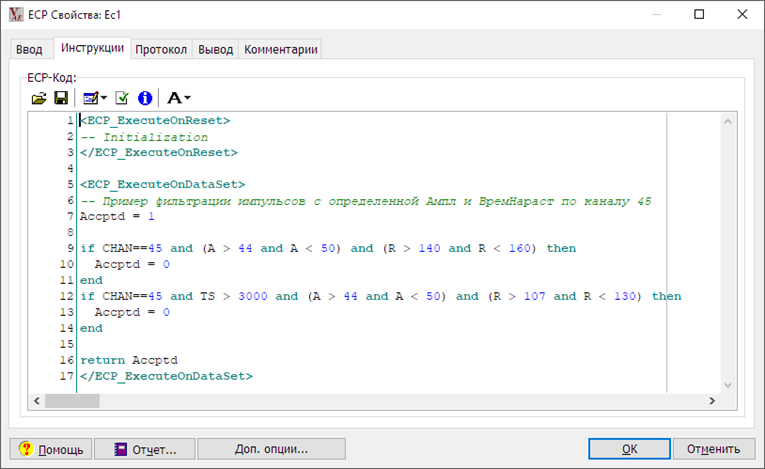
Рис. 20. Пример кода командного процессора
Применение: пример практического применения КП (см. рис. 20) — исключающая фильтрация данных. При испытании, по каналу №45 была зарегистрирована помеха предположительно электрического происхождения. Определено, что помеха имеет следующие параметры:
Амплитуду от 44 до 50 дБ и Время Нарастания от 107 до 160 мкс для разных периодов испытания. CHAN, A, R, TS определены как входные, а Accptd – как выходной параметр.
В результате работы КП параметру Accptd импульсов, параметры которых рассматриваются как характерные для помехи, присваивается значение «0». Параметр Accptd прочих импульсов имеет значение «1». Далее данные фильтруются по параметру Accptd. Результат совместной работы КП и ПФ представлен на рис. 21.
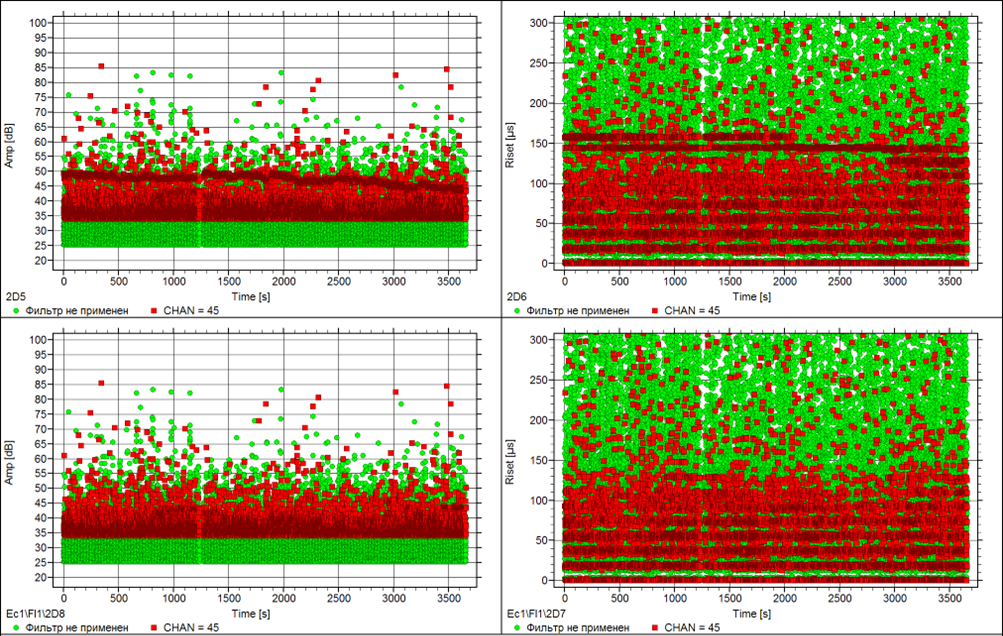
Рис. 21. Исходные данные (диаграммы 2D5 и 2D6) и результат фильтрации (2D7 и 2D8)
Резюме: значение КП трудно переоценить – с учетом возможностей языка программирования, пользователь получает практически неограниченные возможности анализа данных. В поставляемом вместе с VisualAE примере, с помощью КП производится вычисление т.н. iB-value – величины, характеризующей изменение соотношения количества импульсов разных амплитуд в процессе испытания. Пример будет разобран подробно в отдельном обзоре.
КП может с успехом использоваться для сложной фильтрации данных, в том числе фильтрации «механических помех» (т.н. фильтр Свансонга), оценки данных в соответствии с закладываемыми критериями и прочих аналогичных применениях.
За бортом
За бортом настоящего обзора остались некоторые весьма полезные инструменты VisualAE:
Анализ локализованных событий – Анализатор локации позволяет увидеть, каким образом определяется местоположение каждого лоцированного события – оценить, по каким РВП происходит определение координат источника, увидеть гиперболы, пересечение которых определяет координаты источника, и оценить погрешность определения этих координат (см. рис. 22). Кроме того, использование Анализатора локации позволяет оценить, как изменится координата лоцированного источника АЭ при изменении скорости звука, других РВП, а также при регистрации источника разным количеством ПАЭ.

Рис. 22. Анализатор локации
Библиотека – позволяет сохранять наиболее используемые, сложные или уникальные процессоры и визуальные элементы в общем хранилище (для компьютера, на котором установлен пакет VisualAE), а также «передавать» процессоры и визуальные элементы между Конфигурациями.
Экспорт в PRI-файл – хотя концепция VisualAE – проводить всю обработку данных в рамках одной Конфигурации, но результаты работы процессора(ов) фильтрации могут быть сохранены в другом Проекте. Использование экспорта целесообразно, например, при применении сложной фильтрации.
Печать диаграмм и копирование их в буфер обмена (см. рис. 23).
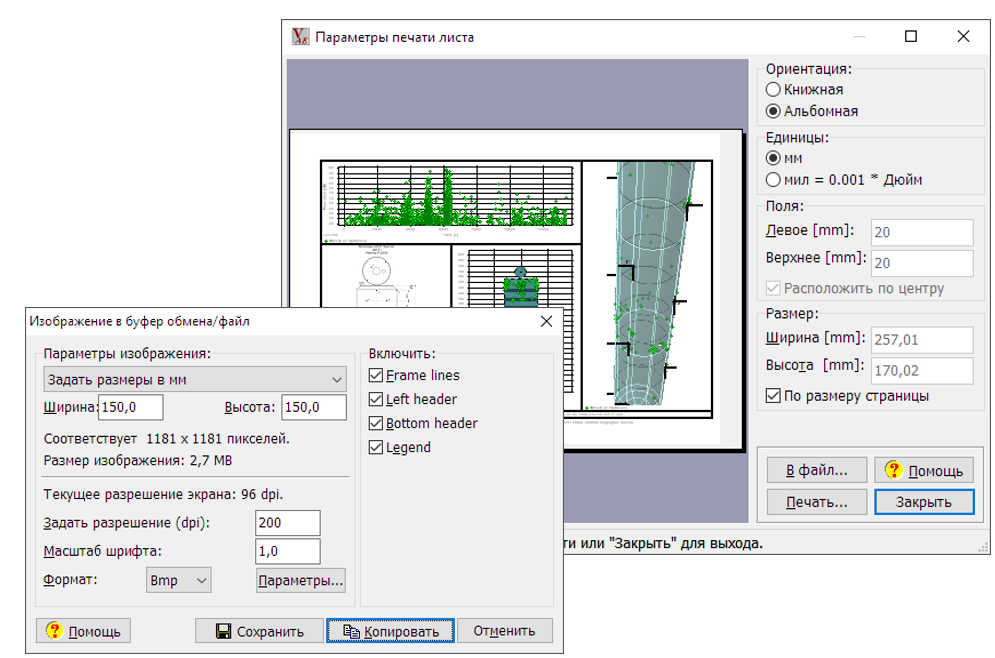
Рис. 23. Диалоги печати листа и копирования диаграммы в буфер обмена
Документация – нельзя не упомянуть документацию, поставляемую в комплекте с системой или программным обеспечением.
Документация включает полное описание аппаратной и программной части системы, а также руководство по применению, в котором приведены, в частности весьма полезные наборы диаграмм и подробные описания алгоритмов локации.
На этом пока заканчиваю. Планирую еще ряд обзоров, касающихся VisualAE:
- Утилиты Vallen Systeme VisualAE
- Программирование ECP
- VisualAE и TR-данные